一、V2与V1的架构区别
和MobielNetV1相比,MobileNet V2 仍使用深度可分离卷积,但其主要构成模块如下图1所示:
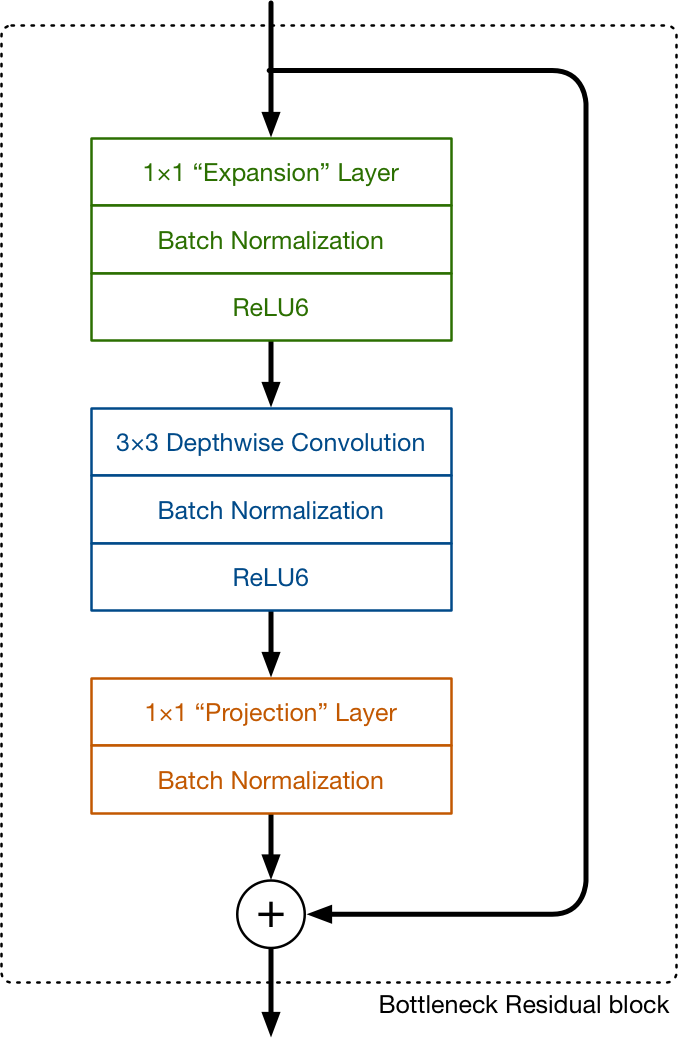
图1(源自Ref [2])
这次block中有三个卷积层,作者分别将其称之为1 x 1 expansion layer、3 x 3 depthwise convolution和1 x 1 projection layer。后两层其实就是V1中的depthwise convolution和1×1 pointwise convolution layer,只不过在V2中,作者后者称为1 x 1 projection layer,并有不同的作用。下面就来看看,两者的差异究竟在哪里。
在V1中,逐点卷积要么使通道数保持不变,要么使通道数翻倍。 在V2中,情况恰恰相反:它使通道数变小。 这就是为什么现在将该层称为投影层( Projection Layer)的原因:它将具有大量维(通道)的数据投影到具有较少维数的张量中。
例如,depthwise convolution可以在具有144个通道的张量上工作,然后projection layer张量缩小至24个通道。这种层也称为bottleneck layer,因为它减少了流经网络的数据量。(这就体现了“bottleneck residual block”名称的一部分:每个块的输出都是瓶颈。)
此外,bottleneck residual block的第一层是新出现的,也就是expansion layer。 它也是1×1卷积, 其目的是在数据进入深度卷积之前扩展数据中的通道数。 因此,expansion layer始终具有比输入通道更多的输出通道(与projection layer相反)。
Expansion layer将通道数扩展多少倍,这个由扩展因子(expansion factor)给出。 这也是调整不同架构的超参数之一, 默认扩展因子为6。
例如图2所示,如果有一个具有24个通道的张量进入一个bottleneck residual block,则expansion layer首先将其转换为具有24 x 6 = 144个通道的新张量。 接下来,depthwise convolution将其滤波器应用于该144通道张量。 最后,projection layer将144个过滤后的通道投影回较小的数量,比如说24个。
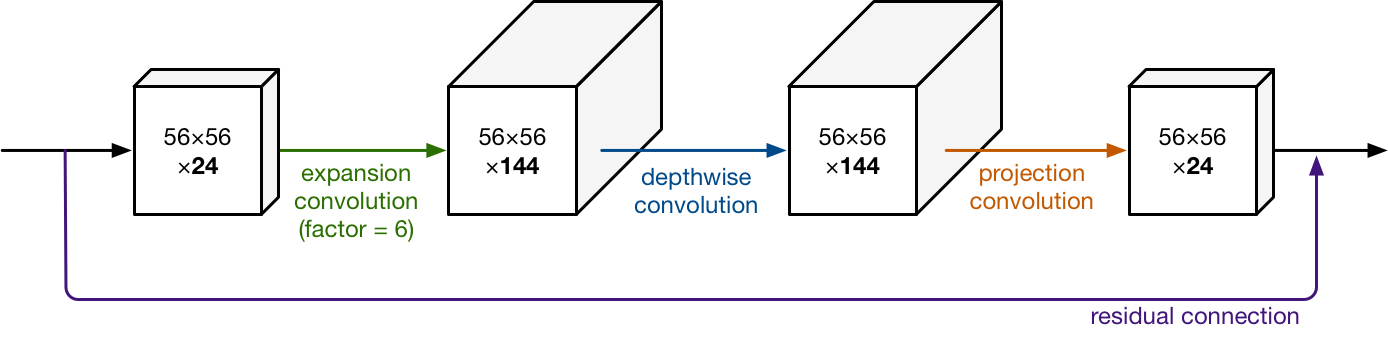
图2(源自Ref [2])
因此,bottleneck residual block的输入和输出是低维张量,而block内发生的滤波步骤是在高维张量上完成的。
思考一下,这样做的好处是什么?
Bottleneck residual block体现了其还存在另一部分,那就是逆残差连接(inverted residual connection),这也是MobileNetV2与MobileNetV1的不同之处。就像在ResNet中一样,它的存在是为了帮助梯度流过网络。只有当进入block的通道数与从block出来的通道数相同时(如图2),才使用**inverted residual connection,但并非总是如此,因为每隔几个块输出通道就增加一次。
一般来说,每个层都有批量归一化,激活层则是ReLU6。 但是,projection layer的输出没有应用激活功能。作者发现,在该层之后使用非线性激活,实际上会破坏低维数据中有用的信息。
这样,MobileNet V2将连续包含17个这样的block,然后是规则的1×1卷积、全局平均池化层和分类层。
注意:第一个block稍有不同,它使用具有32个通道的常规3×3卷积代替扩展层。
具体架构也可见下表。t是扩展因子,c是输出通道数,n是block的重复次数,s是步长,depthwise convolution的卷积核大小均为3 x 3。
| Input | Operator | $t$ | $c$ | $n$ | $s$ |
|---|---|---|---|---|---|
| 224 x 224 x 3 | conv2d | – | 32 | 1 | 2 |
| 112 x 112 x 32 | bottleneck | 1 | 16 | 1 | 1 |
| 112 x 112 x 16 | bottleneck | 6 | 24 | 2 | 2 |
| 56 x 56 x 24 | bottleneck | 6 | 32 | 3 | 2 |
| 28 x 28 x 32 | bottleneck | 6 | 64 | 4 | 2 |
| 14 x 14 x 64 | bottleneck | 6 | 96 | 3 | 1 |
| 14 x 14 x 96 | bottleneck | 6 | 160 | 3 | 2 |
| 7 x 7 x 160 | bottleneck | 6 | 320 | 1 | 1 |
| 7 x 7 x 320 | conv2d 1 x 1 | – | 1280 | 1 | 1 |
| 7 x 7 x 1280 | avgpool 7 x 7 | – | – | 1 | – |
| 1 x 1 x 1280 | conv2d 1 x 1 | – | k | – | – |
二、V2的改进意义
V2体系结构的主要变化是残差连接和扩展/投影层。
对于这种模型,通道数随时间增加,空间尺寸也会相应减少。 但总体而言,由于构成块之间连接的瓶颈层,张量保持相对较小,。如图3所示,我们可以看到数据流经V2网络的情况。

图3(源自Ref [2])
相比之下,V1就使其张量变得更大(最大为7×7×1024)。
使用低维张量是减少计算量的关键。 毕竟,张量越小,卷积层要做的乘法就越少。
但是,仅使用低维张量并不能获得很好的效果!
因为应用卷积层过滤低维张量将无法提取大量信息。 考虑到这个因素,作者首先使用了expansion layer,得到大张量,s使用depthwise convolution对数据进行过滤;然后使用projection layer减小张量。可以说在这方面, MobileNet V2的模块设计做到了两全其美。
举例如图4所示,将块之间流动的低维数据视为真实数据的压缩包。Expansion layer充当解压缩器,它首先将数据还原为完整格式,然后depthwise layer执行重要的滤波工作,最后projection layer将数据压缩以使其再次变小 。
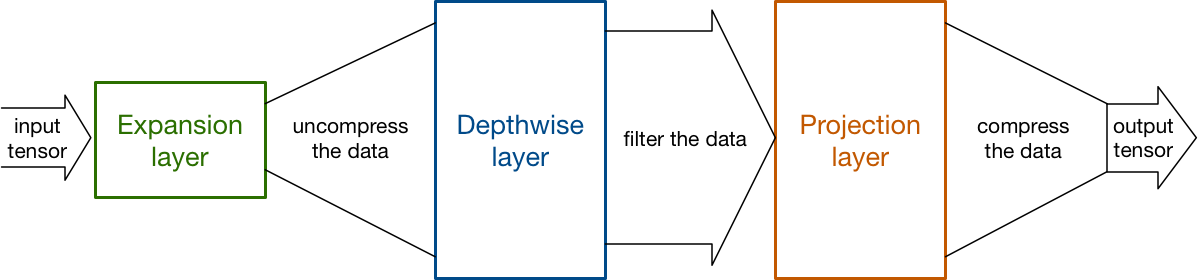
图4(源自Ref [2])
通过学习扩展层和投影层的参数,模型能够在网络的每个阶段最佳地(解)压缩数据。
至此,我们也就能理解,为什么作者将文中的残差连接方式称为“inverted residuals”,我们可以比较一下normal和inverted残差块的区别,如图5所示。
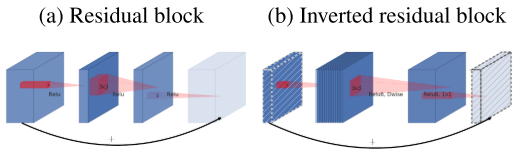
图5(源自Ref [1])
图5中,使用阴影线标记的block后面没有非线性层,通过每个block的宽度来表示相对通道数量。
三、V2与V1的效果比较
3.1 参数量和计算量
我们首先从学习的参数和所需的计算量开始,比较MobileNet V1和V2模型的大小。
| 版本 | MACs(millions) | Parameters(millions) |
|---|---|---|
| MobileNetV1 | 569 | 4.24 |
| MobileNetV2 | 300 | 3.47 |
数据来源于V1和V2,它们采用的width multiplier均为1.0,数据越小代表效果越好。
MACs是乘法累加运算,这可测量对单张224×224 RGB图像进行推理所需的计算量。图像越大,需要的MAC越多。
仅从MAC数量来看,V2的速度应该几乎是V1的两倍。 但是,这不仅仅涉及计算数量。 在移动设备上,内存访问比计算慢得多。 不过,这里V2也有优势:它的参数量只有V1的80%。
3.2 准确率
接下来是准确率的比较。
| 版本 | Top-1 Accuracy | Top-5 Accuracy |
|---|---|---|
| MobileNetV1 | 70.9 | 89.9 |
| MobileNetV2 | 71.8 | 91.0 |
这里的Top-1 Accuracy和Top-5 Accuracy是在ImageNet上获得的,源代码作者声称结果来自与测试集,但查看代码后,结果似乎是从50,000张图像的验证集上获得的。
其实,比较模型之间的准确度可能会产生误导,因为我们需要准确了解模型的评估方式。 为了获得上述数字,将图像的中心区域裁剪到包含原始图像的87.5%的区域,然后将该裁剪的大小调整为224×224像素。
3.2 语义分割的效果
为了验证V1和V2在语义分割方面的能力,作者选用了PASCAL VOC 2012 dataset用来验证,(1)V1和V2分别作为DeepLabv3的特征提取器,(2)简化了DeepLabv3训练头,来加快计算,(3)使用了不同的推理策略来优化运行效果。验证的结果如下表所示。
| Network | OS | ASPP | MF | Miou | Params | Madds |
|---|---|---|---|---|---|---|
| MobIleNet V1 | 16 | √ | × | 75.29 | 11.15M | 14.25B |
| MobIleNet V1 | 8 | √ | √ | 78.56 | 11.15M | 941.9B |
| MobIleNet V2 | 16 | √ | × | 75.7 | 4.52M | 5.8B |
| MobIleNet V2 | 8 | √ | √ | 78.42 | 4.52M | 387B |
| MobIleNet V2 | 16 | × | × | 75.32 | 2.11M | 2.75B |
| MobIleNet V2 | 8 | × | √ | 77.33 | 2.11M | 152.6B |
| ResNet-101 | 16 | √ | × | 80.49 | 58.16M | 81.0B |
| ResNet-101 | 8 | √ | √ | 82.7 | 58.16M | 4870.6B |
我们能够得到以下分析结果:
(1)某些推理策略,比如多尺度输入、增加左右翻转的图像,会极大增加乘法累加量,因此不适合于移动设备的应用;
(2)使用output stride = 16的效率要比output stride = 8的效率高;
(3)MobileNetV1已经是强大的功能提取器,其所需的乘法累加量比ResNet-101 少4.9-5.7倍;
(4)在MobileNetV2的倒数第二个特征图后构建DeepLabv3训练头的效率更高,因为倒数第二个特征图包含320个通道,而不是1280个。因此,在获得类似性能的情况下,但是MobileNetV2所需的运算量比MobileNetV1少2.5倍。
(5)DeepLabv3原先的训练头十分消耗计算力,若删除ASPP模块能够显著降低计算量,但性能只会略微下降。
Reference
[1]. MobileNetV2: Inverted Residuals and Linear Bottlenecks
[2]. MobileNet version 2